線路基準慣性系でイメージしてみよう。
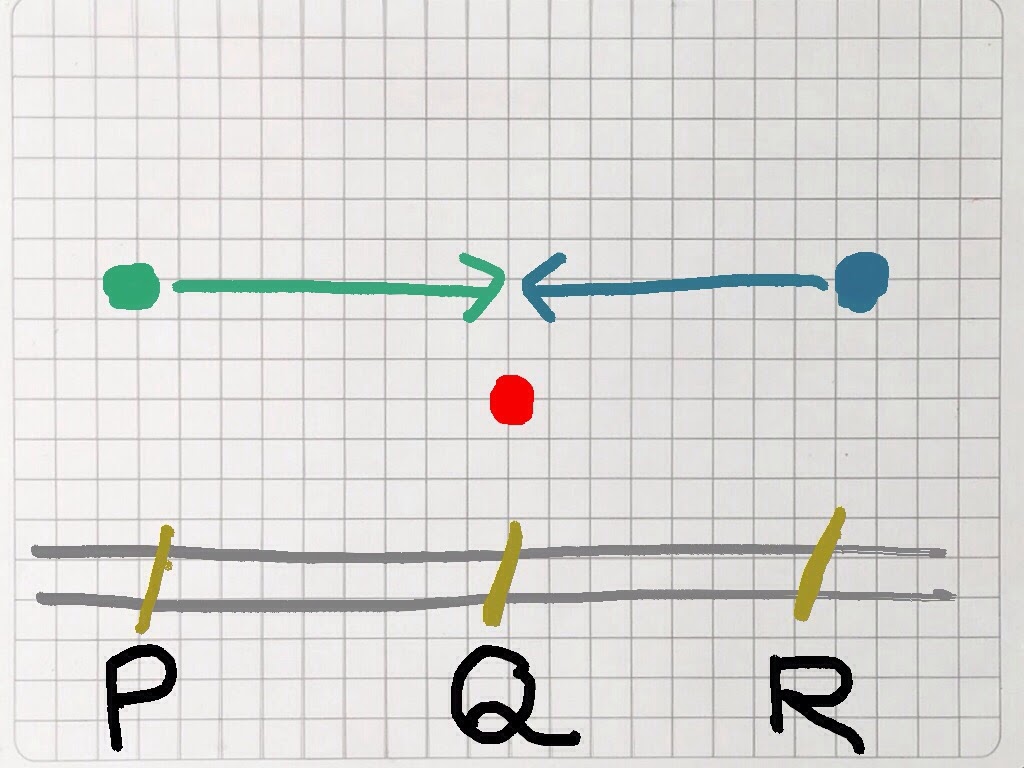
京都駅プラットフォーム中央を地点Qとする。
地点Qに赤ダミー人形が点の大きさで身長0メートルで立つ。

時刻0。
上り新幹線グリーン中央が、地点P。
下り新幹線ブルー中央が、 地点R。

京都駅中央に立つ赤ダミー人形と同じように、
上り列車と下り列車の中央床に立つ身長0メートルの小人を用意する。
実験参加者、3名を点で表した。
1秒後、3名は地点Qでゼロ距離同居した。このとき、時刻1。
頭の中で現場風景イメージしたので一本線の数直線ではなく、
2本のレールと枕木を描いてる。
実際に、こんな風景が見える立ち位置に
実験系を観察するカメラアイを設置する。

視野角を「45度+45度」にしたけど、
「60度+60度」でもいい。
ただし、視野角を180度にしたら線路に立たなきゃならなくなるので危険。
それに、鳥やシュモク鮫(ハンマーヘッド)のように、左右に2つの眼で2方向を観ることになるんで、頭の中で映像を合成しなきゃだ。
2つのカメラ映像のタイミング同期して。
鳥の例外は梟(ふくろう)だ。
ヒトと同じく2つの眼は正面を観る。
ただし首が360度以上廻る。
フクロウの眼球は眼窩(がんか)に固定されているため、眼球を動かせない。その代わり、頭を真後ろに向けたり(首が180度回る)上下を反転させたり、自由に回転させることができるようです。
また、首が270度回転し、広い範囲で物を察知することができるともあります。
「眼窩」
眼球の入っているくぼみ。
https://detail.chiebukuro.yahoo.co.jp/qa/question_detail/q1210179027
もし、透明で幽霊のような列車が素通りする存在の
カメラアイ2台を地点Qに設置すると、
線路奥行き2方向正面の無限遠地点を
遠近法消失点で描くことになって、



https://twitter.com/zionadchat/status/904220981157179392
レールとレールの幅も、
電車、床から天井までの高さも
点で描くとになってしまう。


それに、無限遠からの光って、届くの
どれだけまたなきゃならないの。
実験、不可能じゃん。
実験系を観察するカメラアイ設置を
線路外に設置するから観察範囲は有限になって、
実験系全体をフレーム枠内に収める構図が使える。
遠近法絵画と数直線は頭の中のイメージだから、
近接作用による情報遅延が考慮されていない。
局所点観察者が、この現実世界を知覚したの忘れてる。
どうやって正面映像見ているか気付いていない。
が、従来の思考実験。xy座標を正面イメージにして、
「レール原子1つ1つ」と「枕木1つ1つ」の
見えた方向と過去度合い情報が欠けていた。
見たもの各部の同時性に注意を払わなかった。
いや、そもろも光に速度があることを実際に意識し始めて、
まだヒトの歴史は浅い。慣れていない。
ヤマビコが、「やっほー」の山彦が、
山に反射して戻ってくる遅れには気付いていただろうけど。
古代から。
視野角があることによって、実験観察範囲が有限化され、
実験範囲全体を1台のカメラで、1フレーム枠内観察が準備できた。

線路基準慣性系観察カメラアイ設置点を地点Eとする。
いまはまだ設計図頭なので、実験系空間を光子はどの方向にも
光速Cで直進すると規定。
地点Pの映像情報が√2秒後に入手され、
地点Qの映像情報が1秒後に摂取し、
地点Rの映像情報が√2秒後に手に入る。
京都駅プラットフォーム中央に立つ赤ダミー人形がTPSの1人称で、
TPSをプレイする液晶画面観察者の位置が3人称視点。
実験系観察者、線路基準慣性系の具体的位置になった。
3次元空間内の。
線路基準慣性系には局所点の赤ダミー人形。
赤ダミー人形
上り列車グリーン小人
下り列車ブルー小人。
実験参加者3名を観察するカメラアイが用意された。
E点に設置されたカメラアイは、
線路の3点、PQRの同時刻も
リアルタイム観察もできないので、
だって、お月様表面映像も1秒以上過去。
動画記録から、PQR各地点の現場時刻を揃えて合成して
1枚の現場同時刻映像を作成する。過去風景再現。
これが従来の思考実験に使われた数直線。
実験範囲観察カメラアイが脱落してる地図俯瞰と同じ構造。
できあがった座標空間の同時性にカメラアイが消去された
ローレンツ変換のローレンツ氏や
アインシュタイン氏は、
初めから正面座標で思考してるので、
光を使って情報を集めるとき、
ガリレオ相対性原理では扱っていない
観察範囲線路区間の同時性とか
局所点観察者による空間認識のパラダイムシフト
意識化できなかった。
google 地図で江戸時代の地図を見てるわけじゃない。
普通は、この数年で更新確認した地図各所を
2017版地図として2011から2016の
googleカーで撮影した各地を、同時代同時刻として、
地図では5年ぐらい幅のある同時性瞬間を使ってる。
設計図頭の世界では、光子は光速Cで2点間を結ぶけど、
実験系カメラアイが、線路に近付くように歩いたら、
カメラアイが地点Eから地点Qに等速移動したら、
地点Pと地点Rへの視野角が拡がるし、
地点Pと地点Rからの映像情報の新鮮度が時々刻々、増す。

ついには地点Qに辿り着き、
地点Pからの情報が1秒遅れになり、
地点Rからの情報も1秒遅れになる。
これがミンコフスキー時空図空間を1次元に制限した
過去光円錐底面。数直線の部分空間PQR。

有限範囲からの情報が現在時点に集まる風景を
実験系カメラアイを抽象化して線路地点Qに設置したのが、
ミンコフスキー大先生の時空図。
ところが、ミンコフスキー大先生の時空図では問題がある。


ミンコフスキー大先生の観測者は線路に立ってるけど、
実験系観察カメラアイは、線路の外に立っている。
実験区間線路各部の同時性が保証(収集)されたのに続き、
実験系観察カメラアイと線路区間の同時性を
ピラミッド頂点の別カメラアイで審級(上位保証)する。

線路PQR区間と地点Eが同時平面に存在しているを審級する
上位の観察者を、京都駅上空に設置する必要が生じる。
京都駅上空1光秒高さピラミッド頂点から
線路区間と地点Eカメラアイを同時フレーム枠内に観察する、
上位観察者の誕生。
いまのところ線路地点PQRを観察するカメラアイは
京都駅の南に設置した地点Eだけだから、
ここでは四面体頂点で描いたピラミッド頂点上位観察者。

実験参加者3名の「見られるもの達」と
地点Eカメラの「観るもの」が、
同一平面の部分空間PQRE有限範囲に存在することを
保証しようとする上位観察者存在。
ピラミッド頂点の目。
いまはこの上位概念が必要になるということだけ、
頭の片隅に覚えてくれればいい。
オートバイのサイドカーから、
オートバイ前輪と後輪の同時性を観る、
列車慣性系の有限長さ観察者。も、参加してもらうので。

この列車系TPS視点の列車側面から飛び出た観察者が
京都駅北側を時々刻々移動する様子を
プロット(点々)したいんで。

で、話を整理すると
・線路に立つ赤ダミー人形や列車中央の小人身長0メートル。
・線路から飛び出た線路観察者に列車から飛び出た列車観察者。
・「観るもの」と「見られる長さ」を三角形頂点と底辺にした三角形。
線路慣性系と列車慣性系の三角形が、
同一時刻の同一平面であるを保証(審級)する、
魔改造ミンコフスキー時空図。
こんな感じの相対性過去現場俯瞰に繋がる構造を意識しながら、
線路系と列車系を対立させた窪田氏指摘から、
上り列車と下り列車と線路の3つを使って、
光行差を、光時計筒3つを同時存在させて、
隠れたトリックを暴(あば)いていこう。
今回は実験装置(空間)の解説をした。
電磁現象世界内の実験装置各部の同時性。
観るものと見られるものの同時存在(性)まで
共通化認識した。
いまは線路慣性系を、宣言定義だけで
光子が光速で移動する母子一体幻想で説明してる。
相対性構造がわかって、単純トリックが公知になるとき、
慣性系が、数学思弁から電磁現象世界のものに定義しなおされる。
------
------
------
------
------
------
------
------
http://twilog.org/zionadchat/date-170903
メインまとめリンク
まとめ目次2017 ローレンツ収縮の幻想
ローレンツ収縮の幻想 ブログ版 目次 2017
aaa